ORB-SLAM Implementation
Ran and tested ORB-SLAM for real-time monocular simultaneous localization and mapping. Explored feature extraction, map point management, and loop closure on live camera feed.
Intel RealSense vs Kinect Depth Comparison
Side-by-side depth quality comparison between Intel RealSense and Microsoft Kinect. Evaluated depth accuracy, noise characteristics, and range performance for robotics perception use cases.
RL Agent Learning to Push Objects
Trained a reinforcement learning agent to push objects to a target location in simulation. Explored reward shaping and policy convergence for contact-rich manipulation tasks.
RL Inverted Pendulum in Isaac Sim
Implemented and trained an RL controller for the classic inverted pendulum balancing task inside NVIDIA Isaac Sim. Used as an early test of the Isaac Sim RL workflow and environment setup.
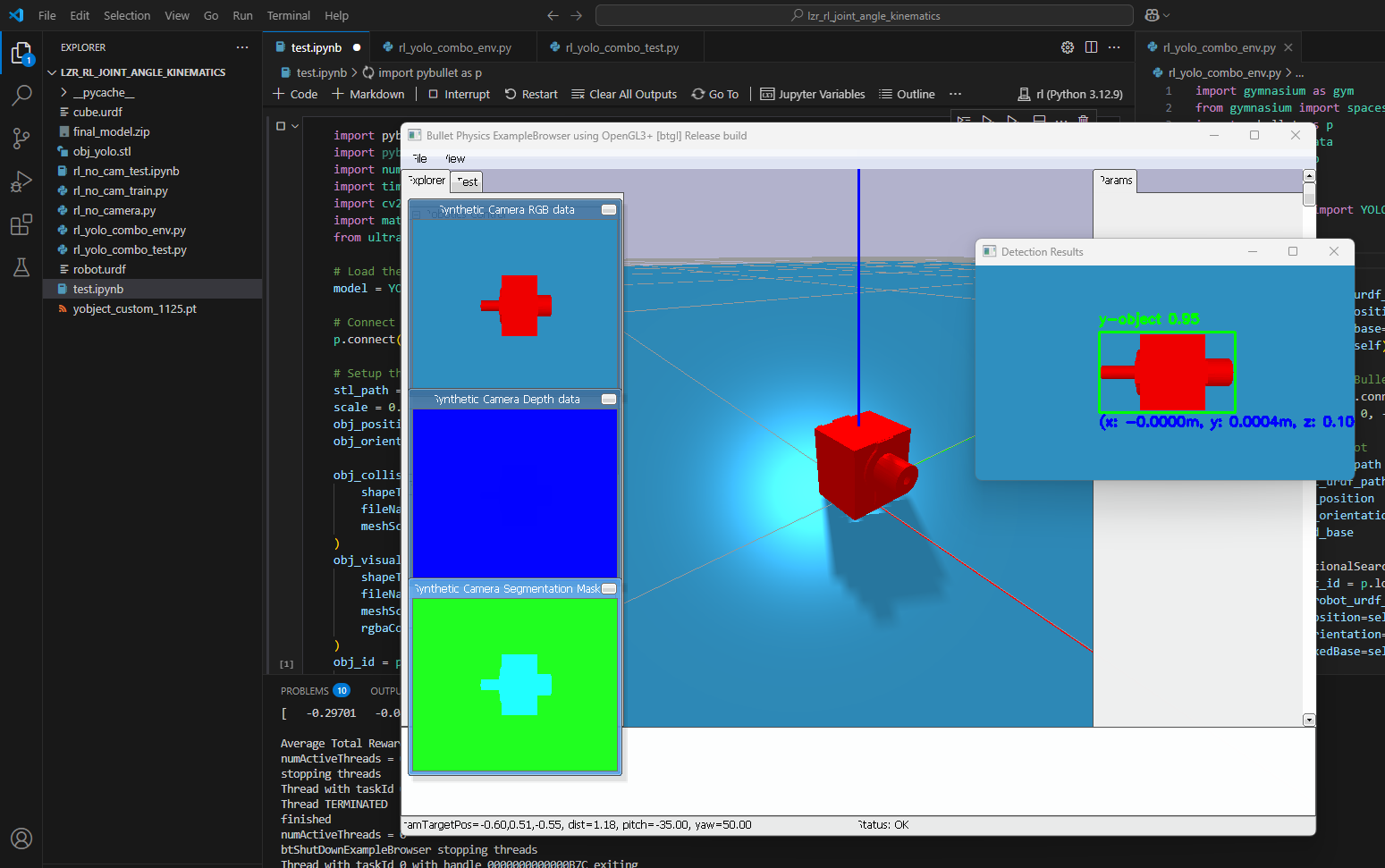
Custom YOLO Model Training with Synthetic Data
Trained a custom YOLO object detection model using synthetically generated images. Explored pipeline from synthetic scene generation to model training and validation.
Slow-Motion Metal Chip Formation Experiment
High-speed camera capture of metal chip formation during machining. Recorded to study material deformation and cutting dynamics at the microscale.